Details
- In accordance with applicable export control laws and regulations, NVIDIA prohibits the sale of this product and its associated kits and modules in any form to Cuba, Iran, North Korea, Syria, the Crimea region, the Donetsk and Luhansk regions of Ukraine, Russia, Belarus, and any entities on the Entity List. (Countries or regions are subject to change based on updates or revisions to export control regulations.)
- Not for use in military, aerospace, nuclear, or supercomputing-related products or applications.
- We do not provide any technical support or services to the aforementioned countries, regions, entities, or restricted end-use applications.
JetBot AI Kit Professional Version

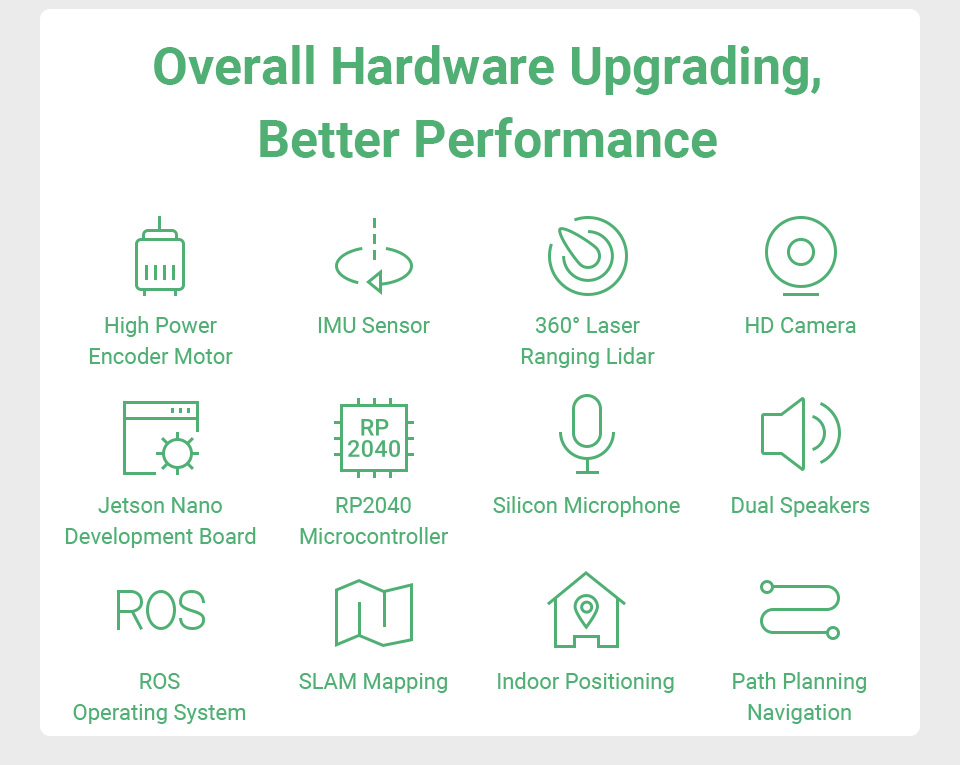
It meets the needs of scientific research algorithm verification in various fields such as Lidar mapping, autonomous navigation, autonomous self driving, intelligent speech, target detection, face recognition, etc. It is not only compatible with the NVIDIA Jetbot open-source project program, but also is overall upgraded in hardware with better performance
| JetBot AI Kit | JetBot ROS Kit | |
|---|---|---|
| Appearance |  |
 |
| Microcontroller | N/A | Raspberry Pi RP2040 Chip |
| Motor | TT motor Reduction rate 1:48 Idle speed 240RPM |
37-520 Metal Encoder Motor Reduction Rate 1:30 Idle Speed 333RPM |
| Motor Encoder | N/A | 11 wire AB phase hall speed sensor, supports wheel odometry |
| IMU Sensor | N/A | MPU9250 |
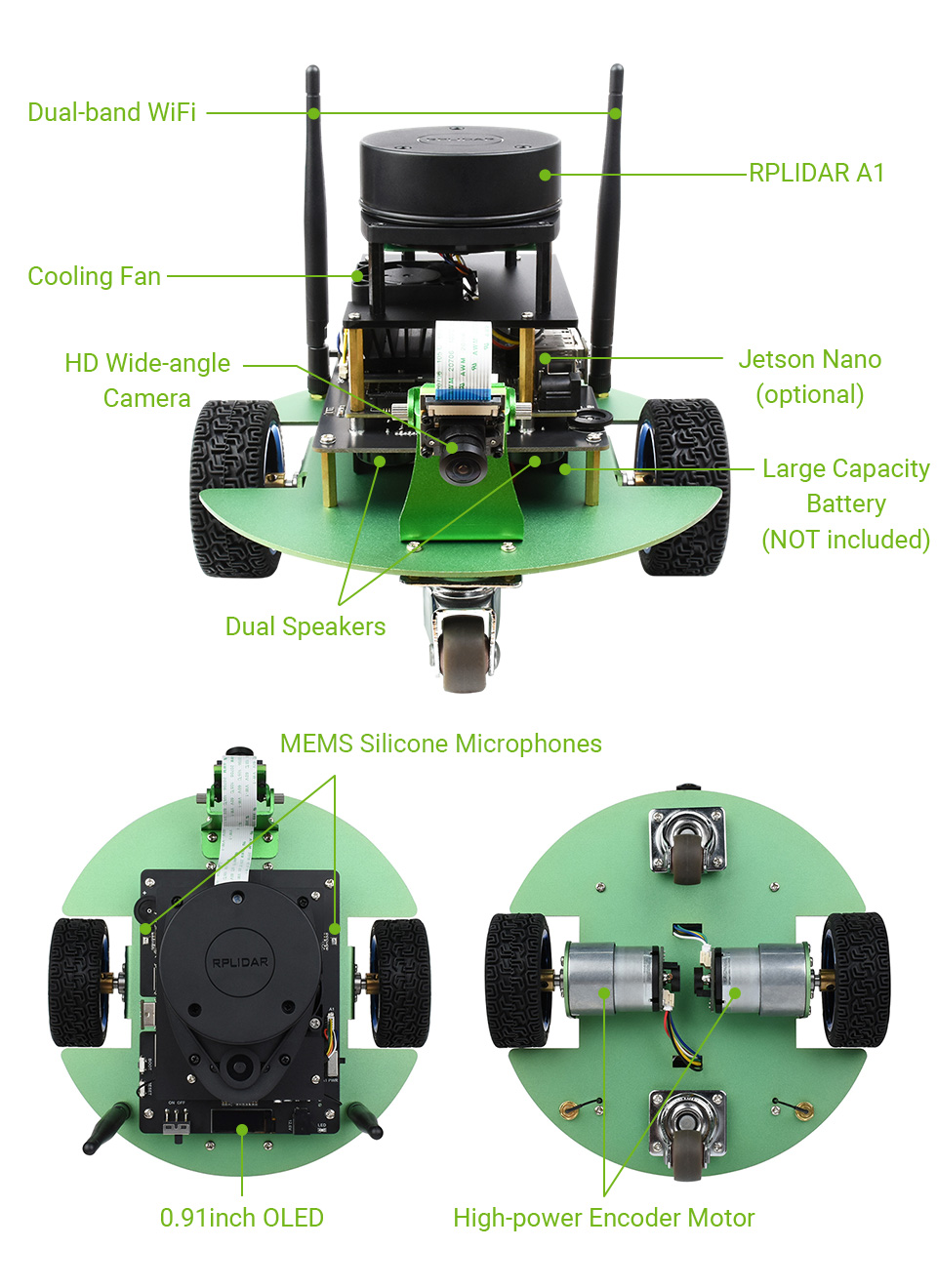
| Lidar | N/A | RPLIDAR A1 |
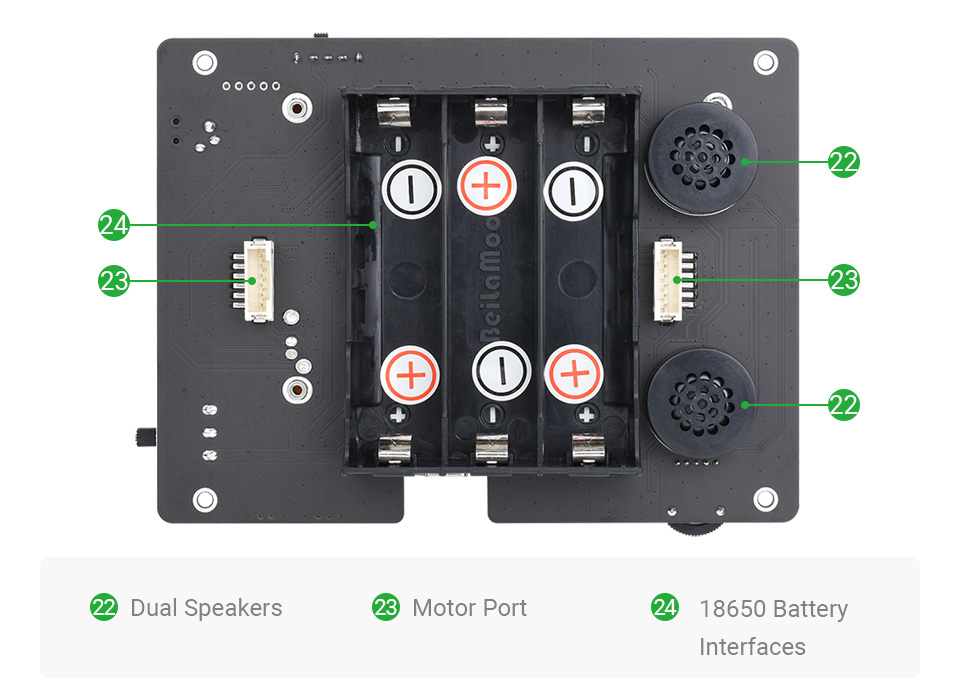
| Audio Interface | N/A | Double Speakers, Dual Microphones, Support Intelligent speech |
| Mapping Navigation | Not Support | Support |

* Note: This product provides three options: Kit A, Kit B and Accessories Pack. Jetson Nano Dev Kit is different in Kit A and Kit B, and is not included in the Accessories Pack. Please refer to the part list for detailed package content.

Jetson Nano Developer Kit (B01)
Jetson Nano Developer Kit (B01) is the official N-VIDIA kit with a variety of onboard interfaces including the 40PIN GPIO expansion header, Gigabit Ethernet port, USB 3.0 ports, HDMI port, DIS port and CSI camera connector. The B01 kit onboard is a non-production specification Jetson Nano module, mainly for development and software testing

Waveshare Jetson Nano Dev Kit
Waveshare Jetson Nano Dev Kit is the alternative solution of B01 kit, with the Jetson Nano B01 eMMC version module and the Waveshare JETSON-IO-BASE-A carrier board, providing almost the same performance and appearance as the Jetson Nano Developer Kit (B01). The Jetson Nano B01 eMMC version is more suitable for users to integrate in production environments.
| Kit | A | B | Accessories Pack |
| Necessary accessories JetBot ROS expansion board, JetBot ROS chassis, IMX219-160 Camera, Wireless-AC8265, RPLIDAR A1, motors, tires, cooling fan, gamepad, power adapter, etc. |
√ | √ | √ |
| 64GB TF Card, Card reader | √ | √ | |
| N-VIDIA kit: Jetson Nano Developer Kit (B01) |
√ | ||
| Waveshare Jetson Nano Dev Kit: The Jetson Nano module, JETSON-IO-BASE-A carrier board and N-VIDIA official heatsink |
√ |
* Please refer to the part list for detailed package content.
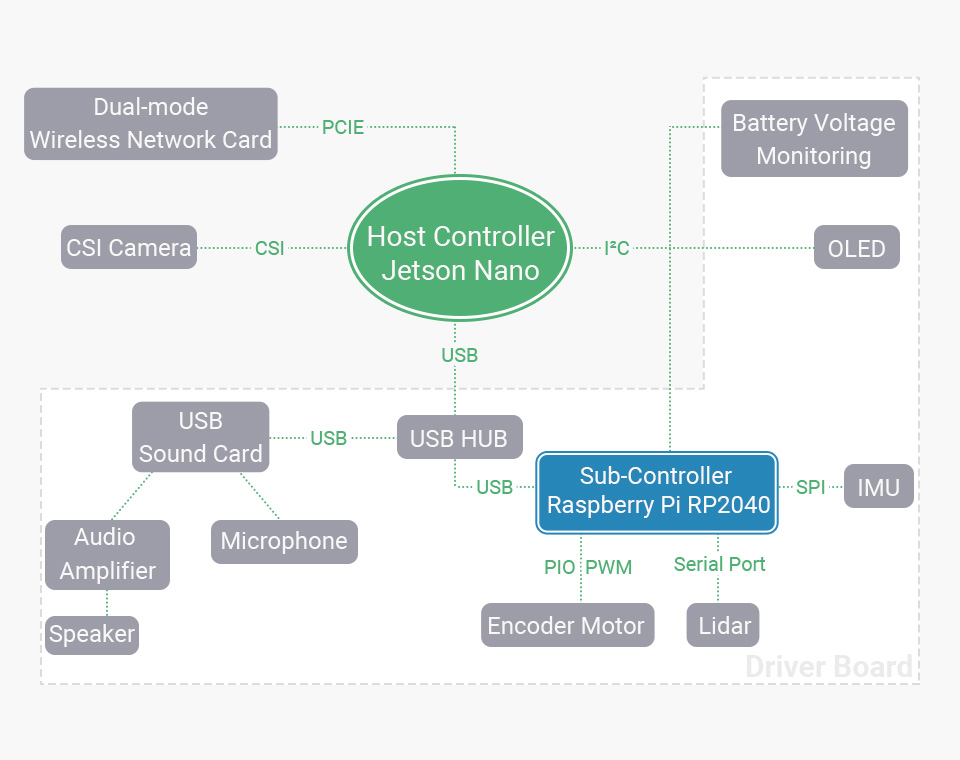
The host controller adopts Jetson Nano Dev Kit, provides two version options: N-VIDIA Jetson Nano Developer Kit (B01) and Waveshare Jetson Nano Dev Kit. Both kits have almost the same performance and appearance, except that the Waveshare Jetson Nano Dev Kit adopts a 16GB eMMC version of the Jetson Nano Module. The Jetson Nano Dev Kit is equipped with 4GB memory and has better performance, responsible for Artificial Intelligence (AI), speech processing, visual processing, mapping and navigation, etc.
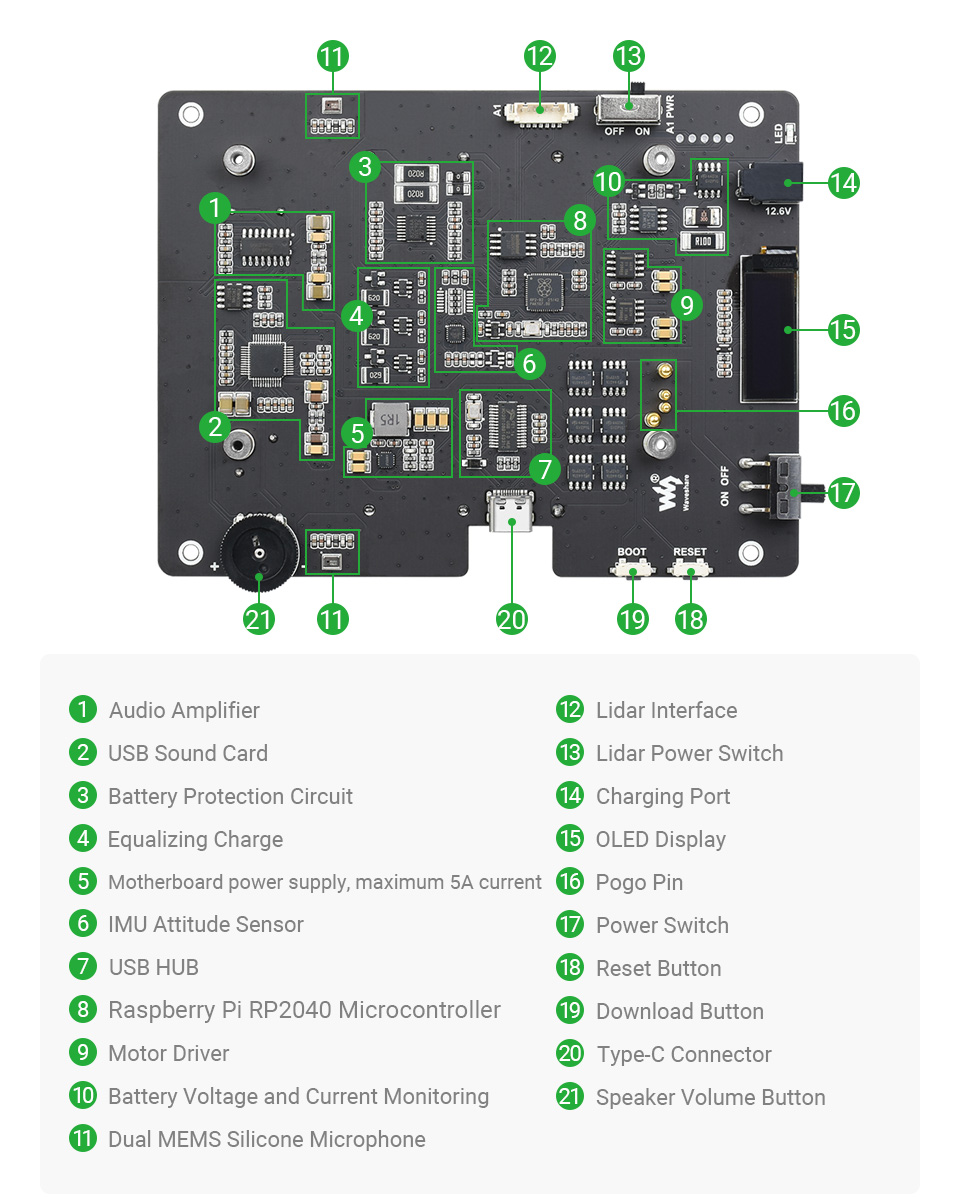
The sub-controller uses the Raspberry Pi RP2040 dual-core microcontroller, which has better real-time performance and higher control accuracy, and is responsible for attitude data collection and motion control.
Adopting USB communication, Transmission Speed Faster than the UART

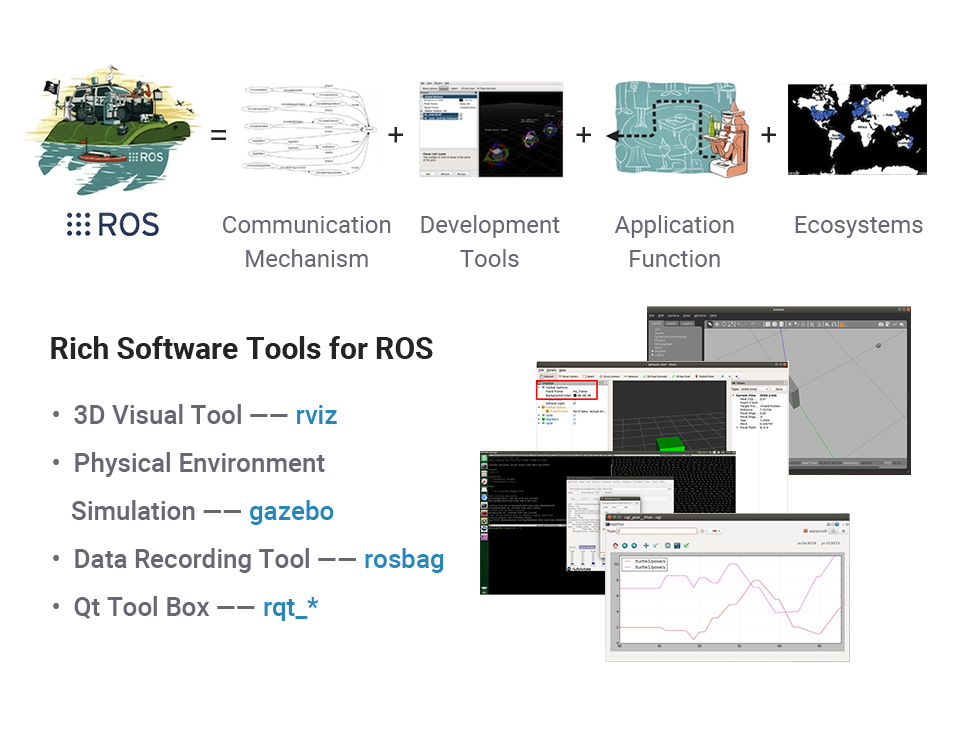
ROS (Robot Operation System) is an open-source operating system that includes a collection of software libraries and tools for robot design. It provides the services expected of an operating system, including hardware abstraction, bottom layer device control, implementation of common functions, message transfering between processes, and package management. ROS simplifies robot design and is the mainstream robot software framework in the world.
Completely Compatible with Original JetBot Demo
The expansion board supports I2C slave mode control without porting and completely compatible with NVIDIA JetBot open-source project program, easily realizing AI functions such as obstacle avoidance and auto line tracking.
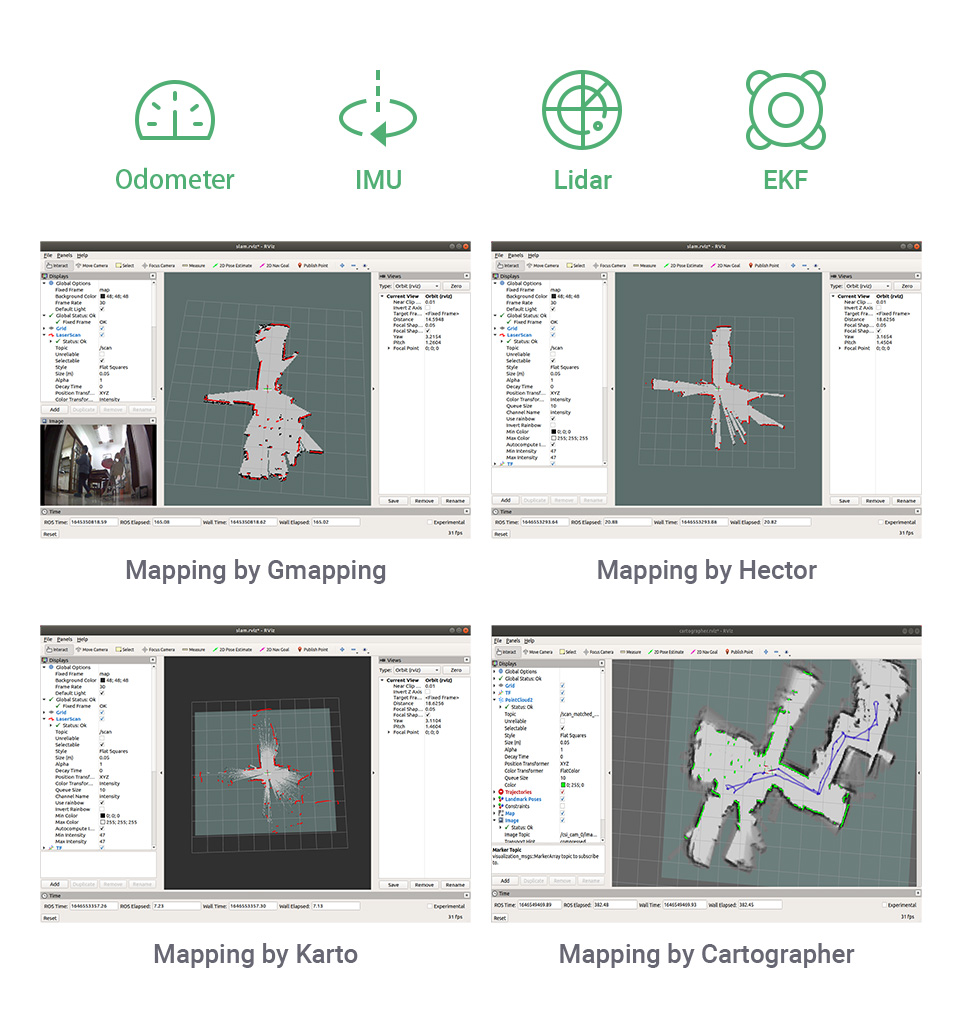
Mapping with odometer, IMU, lidar, EKF, etc.
Supports Gmapping, Hector, Karto, and Cartographer mapping algorithms
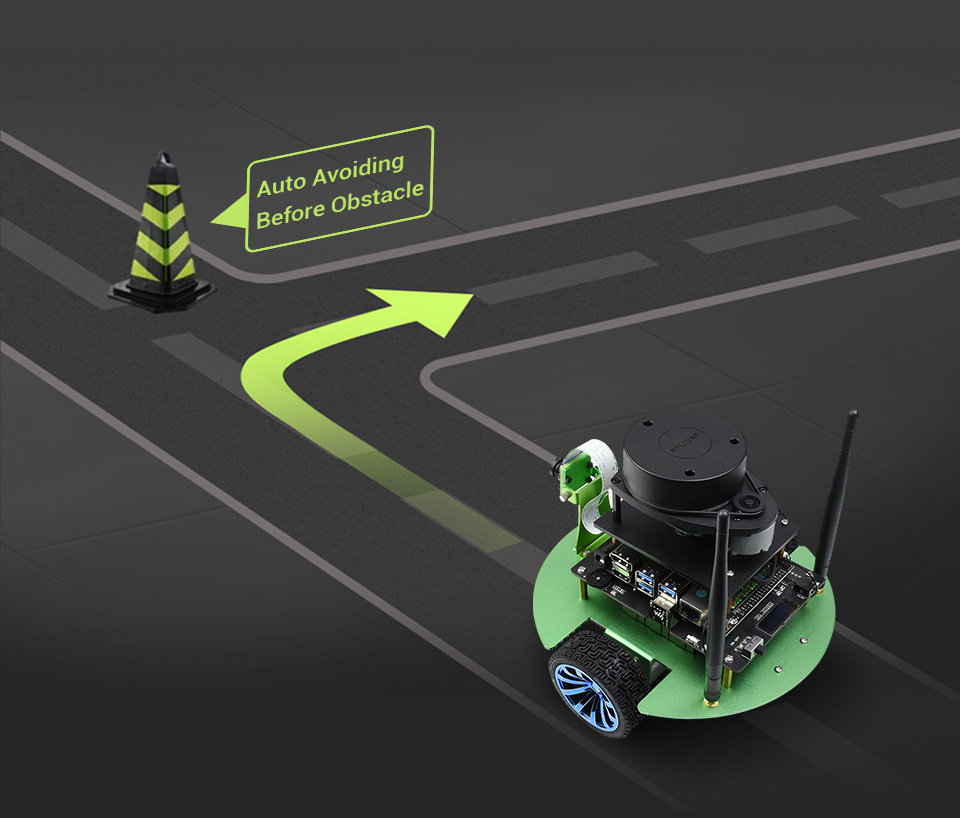
Dynamic Obstacle Avoidance
Adaptive Monte Carlo Localization (AMCL)
Move_base Autonomous Navigation
Supports single-point navigation, multi-point patrol navigation, and mapping while navigating
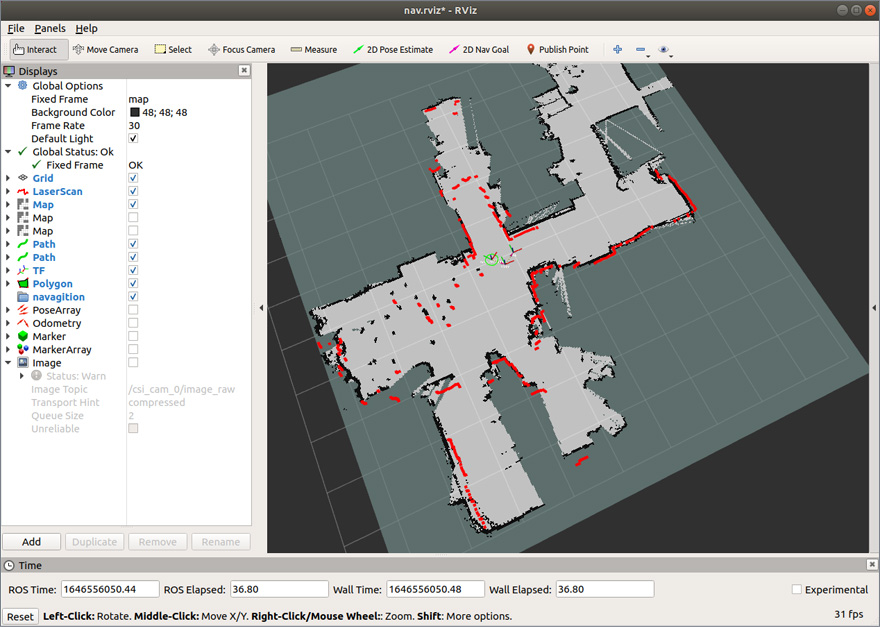
Single-point Navigation
After publishing the navigation target position, the robot will automatically plan the path to navigate to the target position.
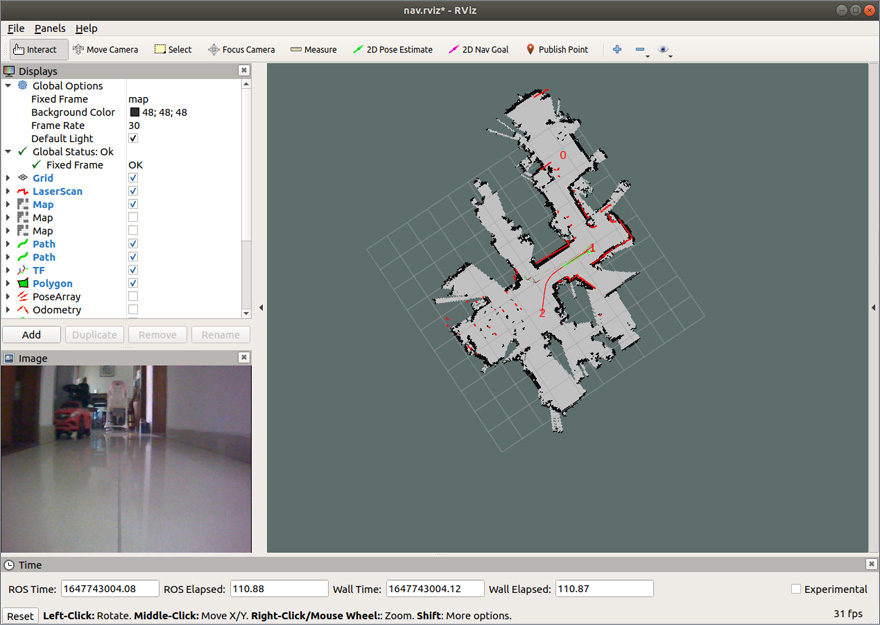
Multipoint Patrol Navigation
Add navigation dots, the robot will cruise and navigate between the navigation dots.
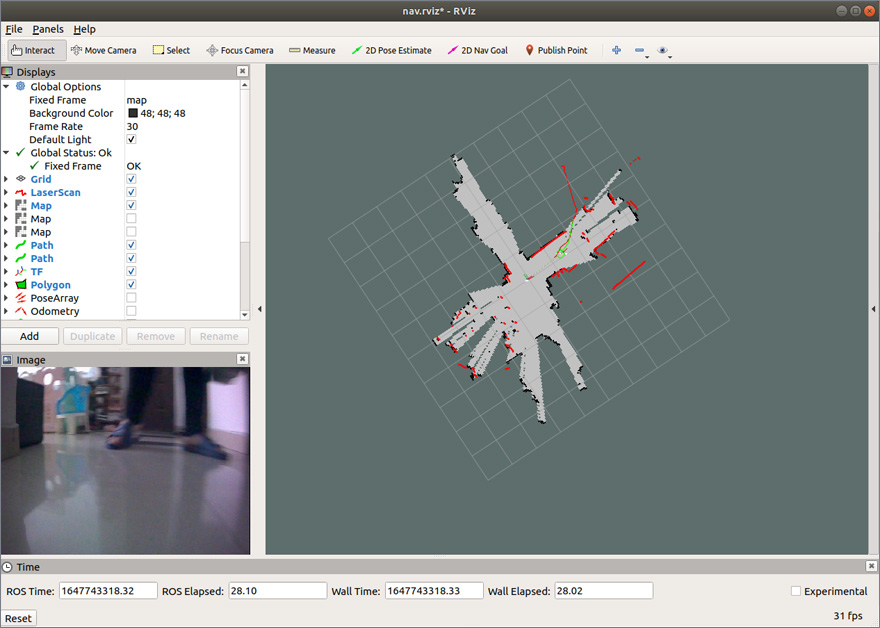
Mapping while navigating
After publishing the navigation target position, the robot will automatically explore the path to the target point, and publish it while scanning the map.
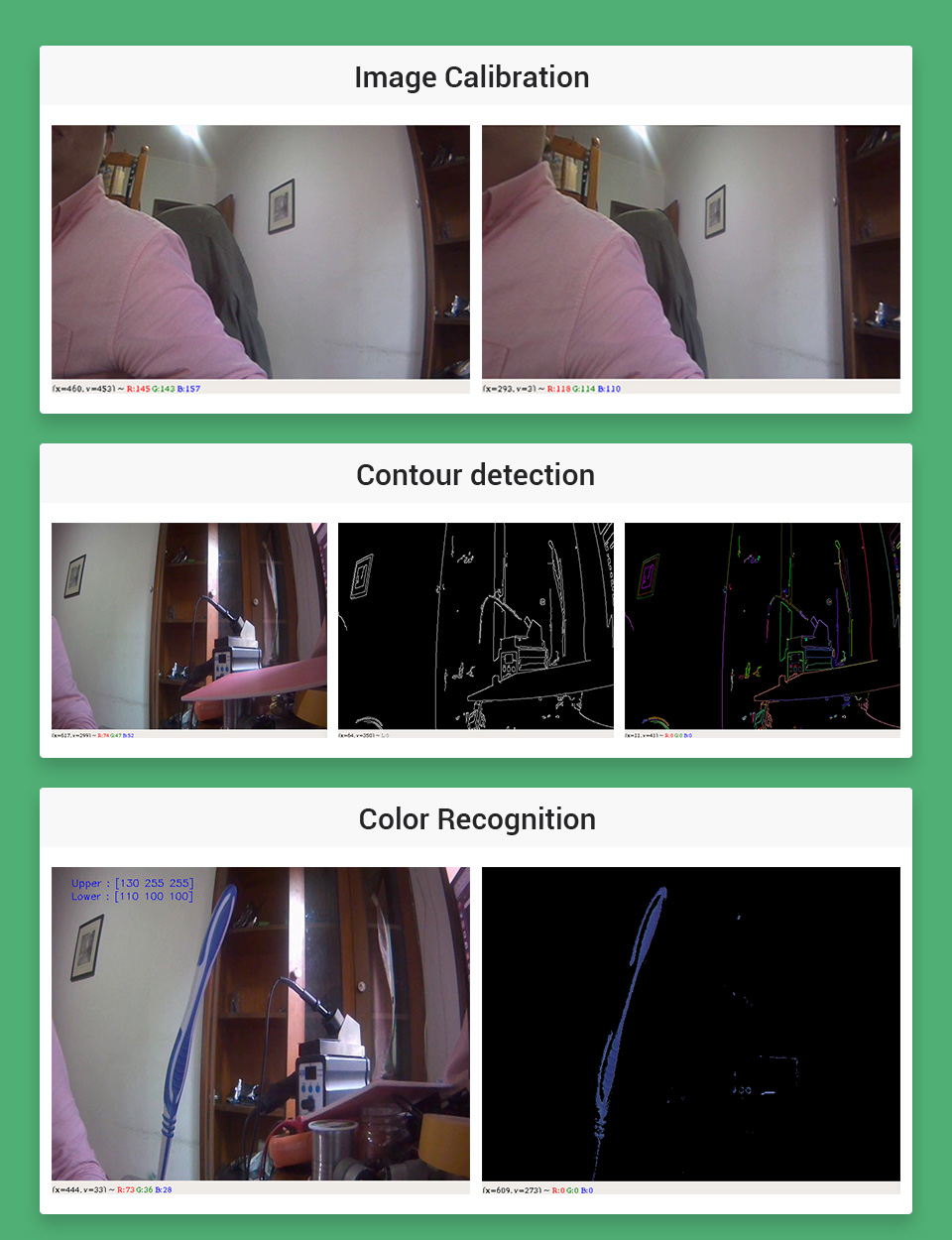
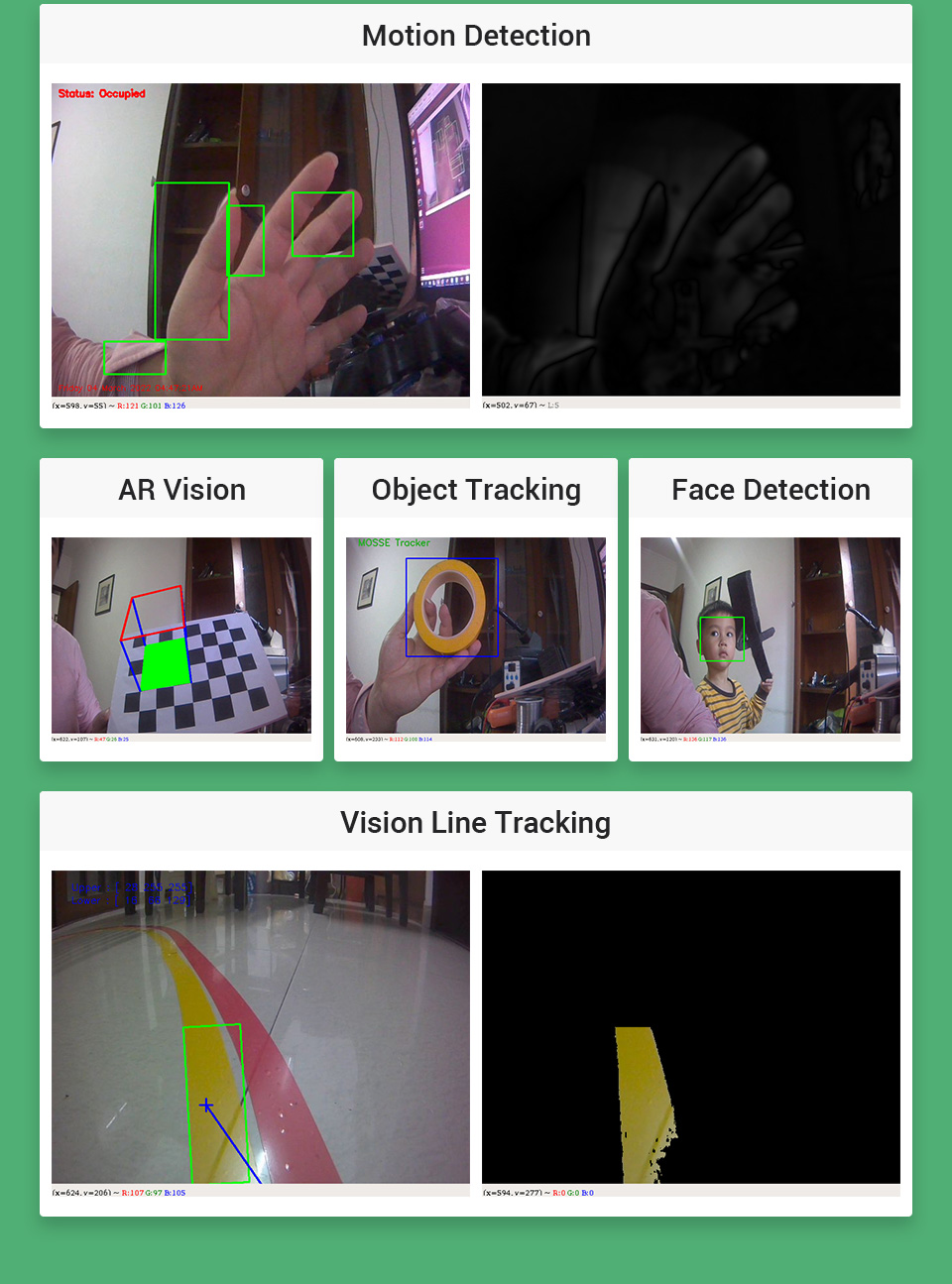
Integrates OpenCV vision library, with extensive algorithm demos
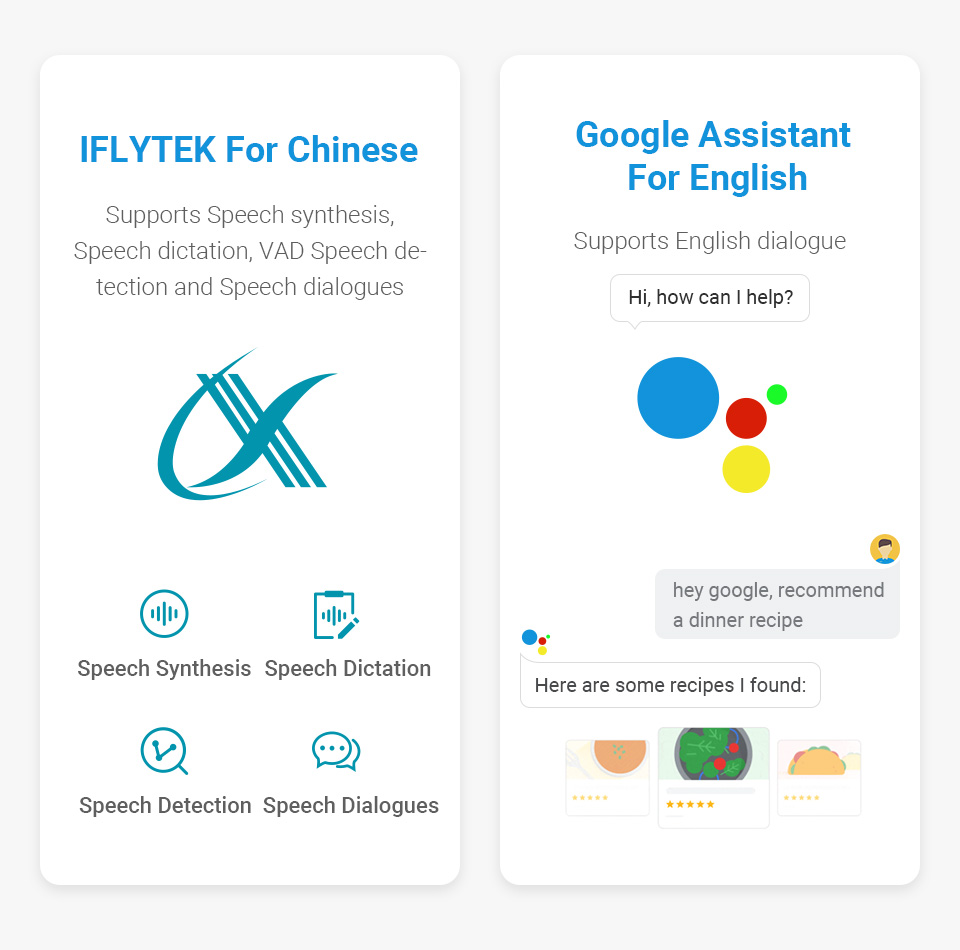
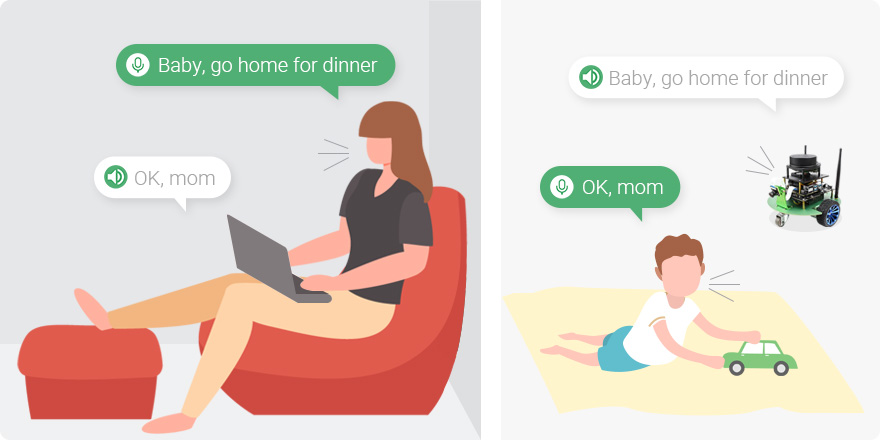
Supports remote Speech intercom, Speech synthesis, Speech detection, Speech recognition, human-computer Speech interaction
Real-time speech transmission between the computer and the robot, enables two-way remote communication
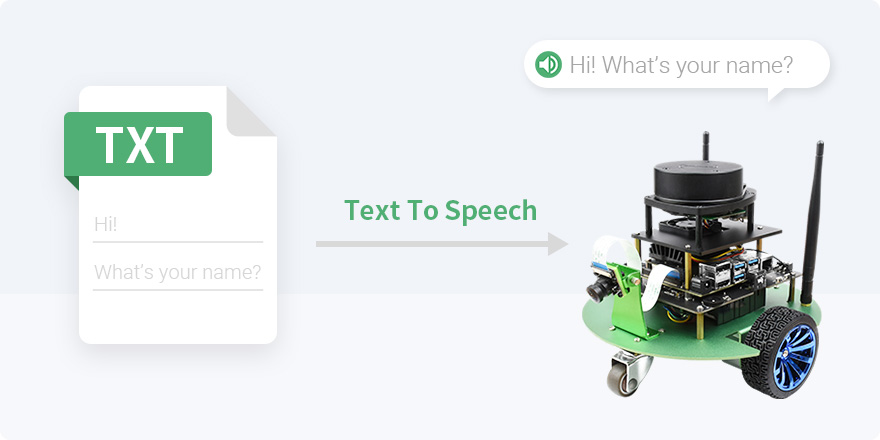
Convert text to natural, smooth vocals and play
Send a text topic to the robot, and you can hear it talking
Detects the sound of the audio stream and removes the mute part
Only take the part that the person speaks
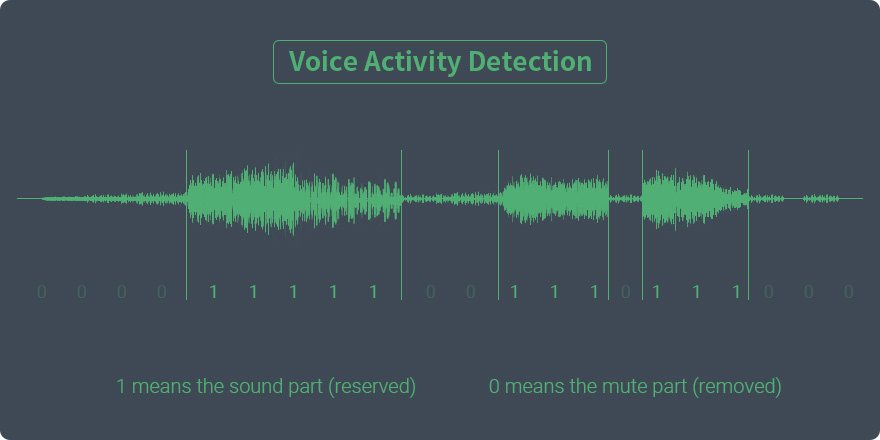
Recognize audio as text

High-quality carbon brushes, all-metal gear structure, high precision, low running noise, 11-wire AB-phase Hall speed encoder, support PID closed-loop speed control to calculate wheel odometer information

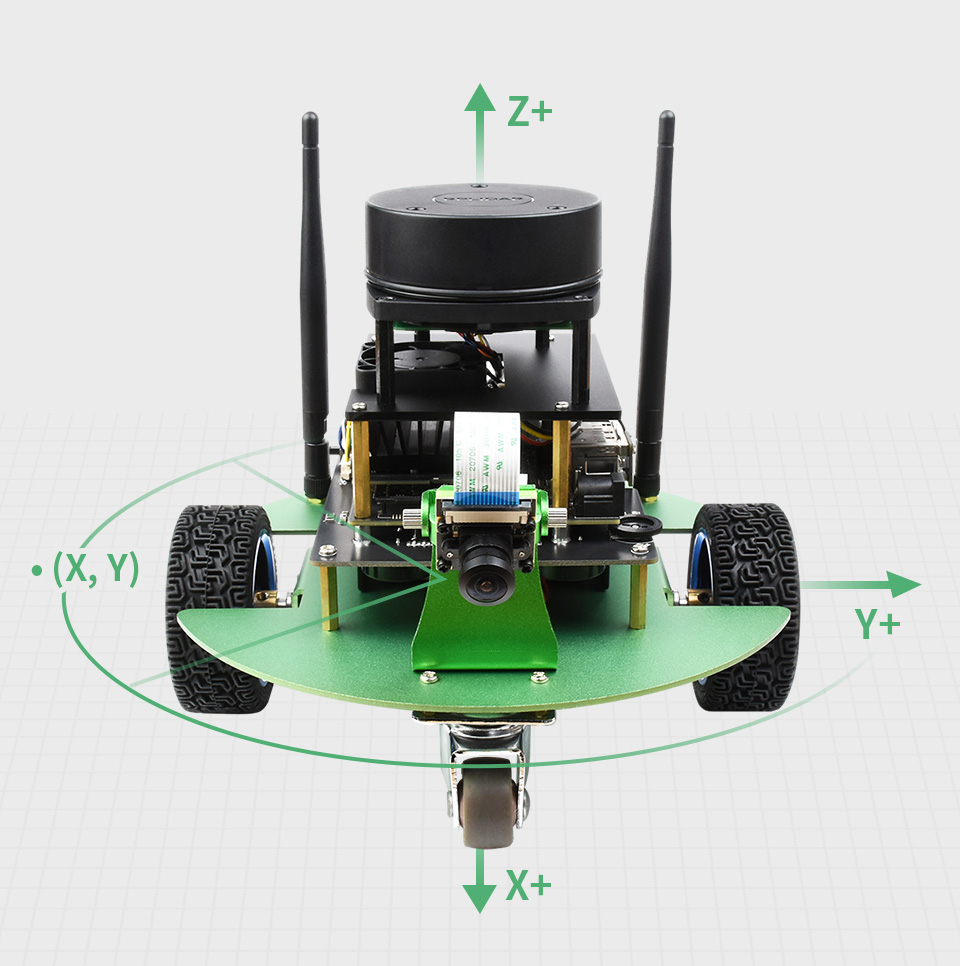
Built-in high-precision 9-axis motion attitude sensor, using extended Kalman filter to merge wheel odometer and IMU data, can produce higher-precision robot attitude
360-degree scanning and ranging of the surrounding environment to obtain a contour map around the robot

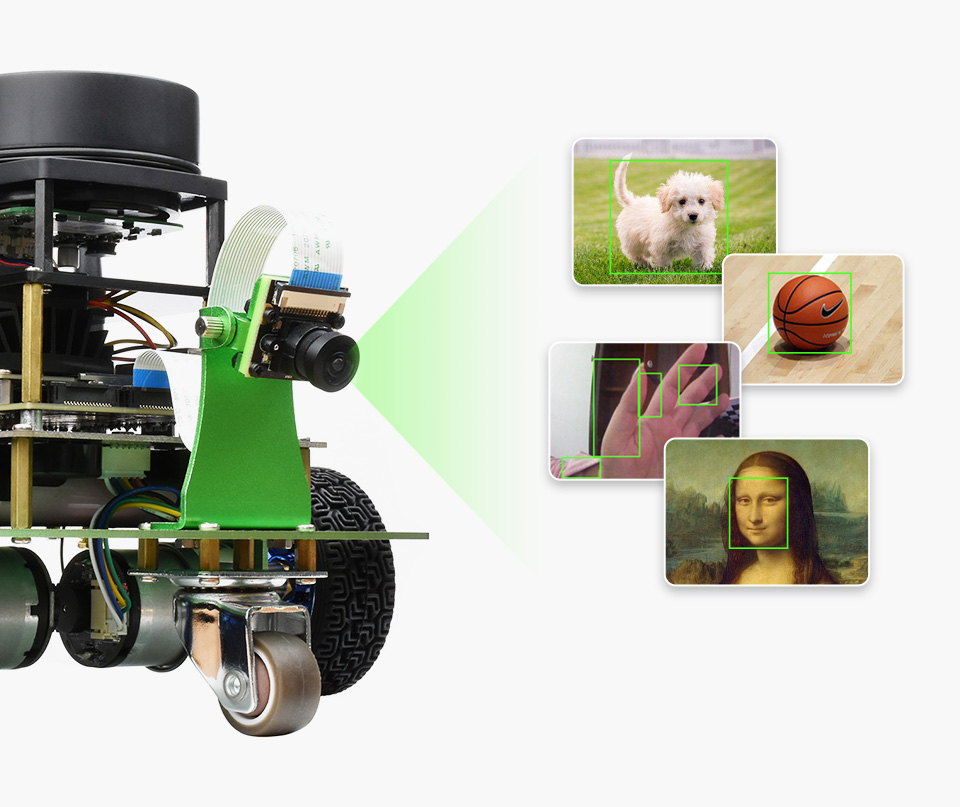
IMX219 Sensor, 3280 X 2464Resolution
Suitable for OpenCV vision development, object recognition, target tracking, automatic driving and other AI functions
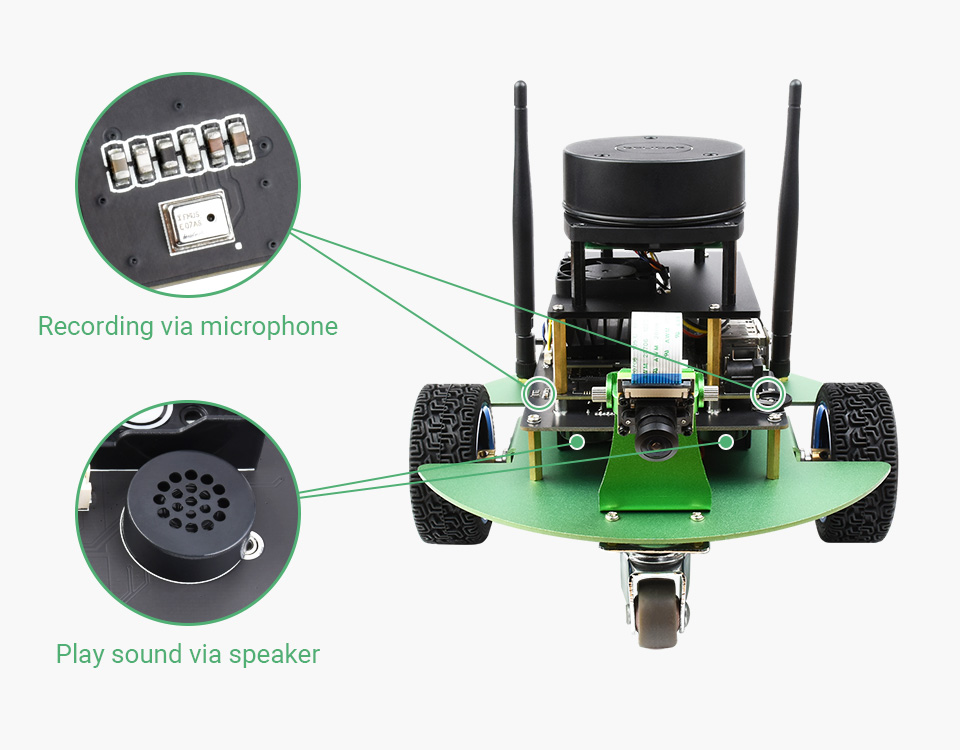
Onboard two high-quality MEMS silicon microphones and dual speakers for stereo recording and playback
So the robot also has "ears" and "mouths" that can "listen" and "talk". Easily realize intelligent speech interaction
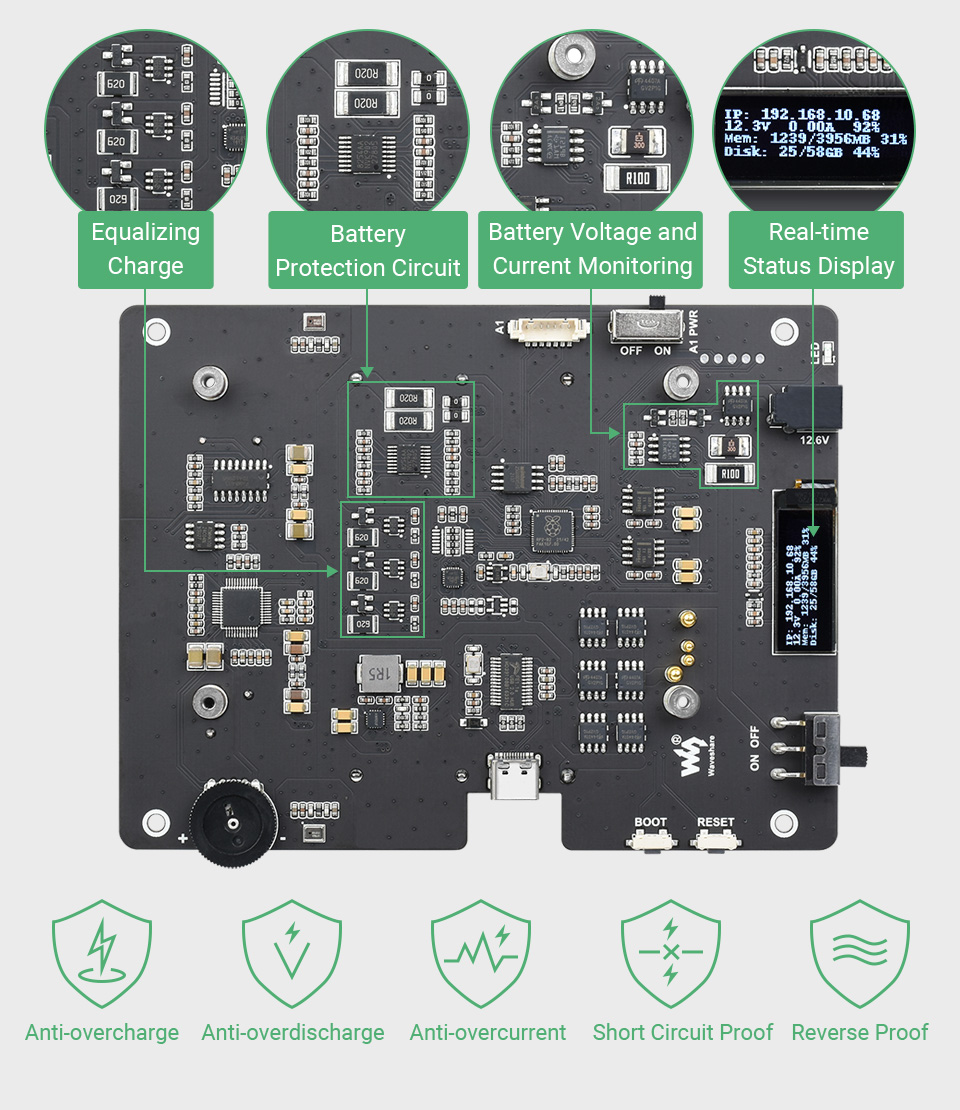
Onboard battery protection circuit for preventing overcharge, over-discharge, overcurrent, short circuit proof, with reverse proof, and equalizing charge. Makes your operation more stable and safer. Built-in battery detection circuit, onboard OLED to real-time display the battery voltage, current, and remaining battery capacity.
SAFETY CAUTIONS
- Li-ion and Li-po batteries are quite unstable. They may cause fire, personal injury, or property damage, if they're not properly recharged or used.
- Do not reversely connect the polarities when recharging or discharging the battery. Do not use inferior charger/charging panel to recharge the battery.
- Do not mix use old batteries with new ones, avoid using batteries of different brands.
- When buying Lithium battery, should always make sure the battery specification is compatible with the expansion board. Choose batteries from formal manufacturer, and ensure the batteries will work stably and safely by aging test.
- Lithium batteries have limited cycle life, they will also deteriorate as time goes by. Should be replaced with new ones when the batteries reaching their max cycle life, or working over two years, whichever comes first.
- Should be placed carefully and properly, keep it away from inflammables and explosives articles, away from children, avoid any safety accident caused by careless storage.


| JetBot ROS | JetRacer ROS | JetBot | JetRacer | JetRacer Pro | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
 |
|
 |
 |
||||||
| Kit | A | B | A | B | A | B | A | B | A | B |
| Controller* | B01 | WS 4GB | B01 | WS 4GB | B01 | WS 4GB | B01 | WS 4GB | B01 | WS 4GB |
| MICROCONTROLLER | RP2040 | N/A | ||||||||
| Intelligent Speech | Double Speakers Dual Microphones Support Intelligent speech |
One Speaker Dual Microphones Support Intelligent speech |
N/A | |||||||
| SENSOR | IMU Sensor RPLIDAR A1 |
N/A | ||||||||
| MAPPING NAVIGATION | Support | Not Support | ||||||||
| Camera | 8MP HD resolution, 160° FOV wide angle camera | |||||||||
| OLED | 0.91" 128×32 pixels | |||||||||
| Wireless | AC8265 wireless NIC, 2.4G/5G dual-band WiFi, Bluetooth 4.2 | |||||||||
| Driving Type | Differential 2WD | Ackerman steering Dual gearmotor rear wheel drive |
Differential 2WD | Ackerman steering Dual gearmotor rear wheel drive |
Ackerman steering High speed motors 4WD Front and rear axle differentials |
|||||
| Shock absorber | N/A | Adjustable oil-filled shocks 4WD independent suspension |
||||||||
| Power supply | 12.6V, 18650 battery × 3 (connected in series) |
8.4V, 18650 battery × 4 (two in parallel, two in series) |
||||||||
| Note: the 18650 batteries are NOT included. | ||||||||||
| motor | 37-520 Metal Encoder Motor Reduction Rate 1:30 Idle Speed 333RPM |
TT motor Reduction rate 1:48 Idle speed 240RPM |
37-520 DC gearmotor Reduction rate 1:10 Idle speed 740RPM |
RC380 high speed carbon brushed motor Idle speed 15000RPM |
||||||
| MOTOR ENCODER | AB phase Hall encoder | N/A | ||||||||
| Servo | N/A | 9kg/cm torque | N/A | 9kg/cm torque | 6kg/cm torque | |||||
| Chassis | Aluminum alloy chassis | Quality rugged plastic chassis | ||||||||
| Crashproof | N/A | Front sponge | N/A | Front sponge | ||||||
| Program library | JetBot, ROS | JetRacer, DonkeyCar, ROS | JetBot, ROS | JetRacer, DonkeyCar | ||||||
| Suggestion | ROS series Entry level Experienced programming skill required |
Entry level Basic programming skill required |
Competition level Experienced programming skill required |
High speed competition level Experienced programming skill required |
||||||
| Note | *Controller: BO1 stands for Jetson Nano Developer Kit (B01) controller, with 4GB RAM WS 4GB stands for Jetson Nano Module + Waveshare carrier board, B01 compatible, with 4GB RAM |
|||||||||
Quick Overview
- The 18650 batteries are NOT included
- Please note that the battery length SHOULD be less than 67mm, some batteries with protection plate in the market are NOT supported, learn more
- OPTIONS Jetson Nano Dev Kit
- OPTIONS TF Card 64GB x 1
- OPTIONS TF card reader x 1
- JetBot ROS chassis x 1
- JetBot ROS expansion board x 1
- RPLIDAR A1 x 1
- High power encoder motor x 2
- Acrylic piece x 1
- Wireless-AC8265 with antennas x 1
- IMX219-160 Camera x 1
- Acrylic camera spacer x 1
- 1-inch caster x 2
- Cooling fan x 1
- 65mm Tire x 2
- Wireless gamepad x 1
- USB adapter x 1
- Camera holder x 1
- PH2.0 6PIN Cable x 2
- 12.6V 2A battery charger x 1
- 6mm hole Coupler x 2
- Coupler screws x 4
- Mini cross wrench sleeve x 1
- Spanner x 1
- Allen Spanner x 1
- Screwdriver 2PCS x 1
- Screws pack x 1

