Details


| Dimensions | 235.25 × 173 × 101.24mm |
| Chassis weight | 2375±5g |
| Steering mode | Differential steering |
| Number of driving wheels | 4 |
| Suspension | 4-wheel independent suspension |
| Chassis height | 34.24mm |
| Motor no-load speed | 180rpm@12V (voltage-dependent) |
| Wheelbase | 154mm |
| Drive wheel diameter | 74.5mm |
| Battery set support | 3s2p 18650 rechargeable Lithium battery set (NOT included) is recommended |
| Charging port | DC 5.5*2.1 jack |
| External power supply | Powered directly by the battery set |
| Extension rails | 110mm pitch, 1020 aluminum profile |
| Maximum operating speed | 0.53m/s@12V (voltage-dependent) |
| Payload capacity | 12KG |
| Maximum climbing angle | 30° |
| Minimum turning radius | 0m (in-situ rotation is affected by payload and ground friction conditions) |
| Chassis - host communication protocol | USB / UART / HTTP |
| Chassis - hub motor communication protocol | LIN bus |
| Chassis - bus servo communication protocol | TTL / RS485 |
| Protection level | IP32 |
| Operating temperature | 0°C~40°C |
The Cobra Flex is a universal modular Drive-by-Wire chassis with strong off-road crossing ability and shock-absorbing performance, open source all code for secondary development. It supports multiple host computers (Raspberry Pi, Jetson Orin Nano, etc.), the host computer can communicate with the chassis through USB or serial port. The four wheels are driven by 4x bus hub motors with built-in FOC control circuit, which provide strong power and smooth running speed.
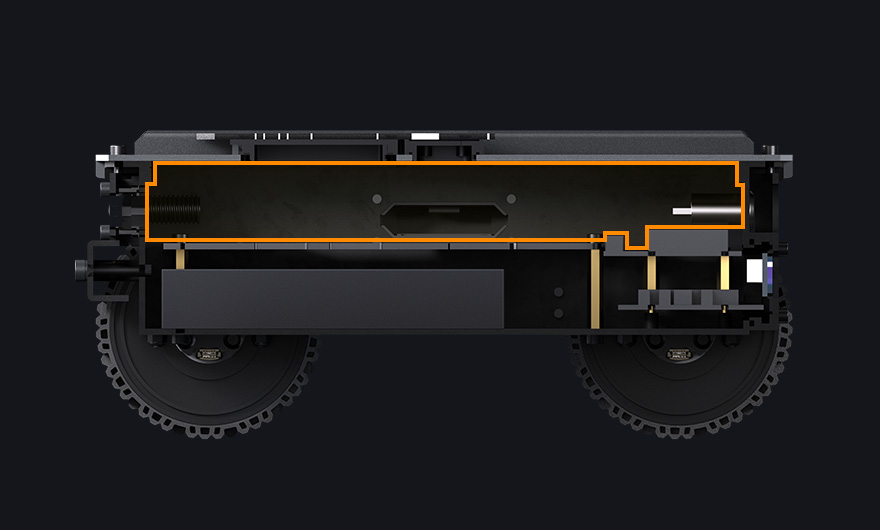
Reserved a large internal space for users to install a battery set for uninterruptible power of the robot (a 3s2p 18650 Lithium battery set is recommended), supports charging and power output at the same time. Built in multi-functional robot driver board based on ESP32, adopts strong and weak electric isolation design and supports connecting bus servos, with onboard Wi-Fi (only for short-distance debugging) and Bluetooth. Adopts compact four-wheel independent suspension with CNC process, can easily meet the needs of heavy loads, shock absorption, and off-road. Also, it comes with 2 x 1020 European standard profile rails, providing more possibilities for secondary development.
Adopts independent suspension structure and hub motor design, significantly optimizing the internal space of the chassis. Users can install a compatible Lithium battery set according to the selection guide provided in the wiki (a 3s2p 18650 Lithium battery set is recommended). If the chosen battery set is appropriately sized, there will still be ample space inside the chassis for installing Raspberry Pi, Jetson Orin series or other host computers, and camera module, etc. Users can also freely plan the use of the space according to their actual needs.
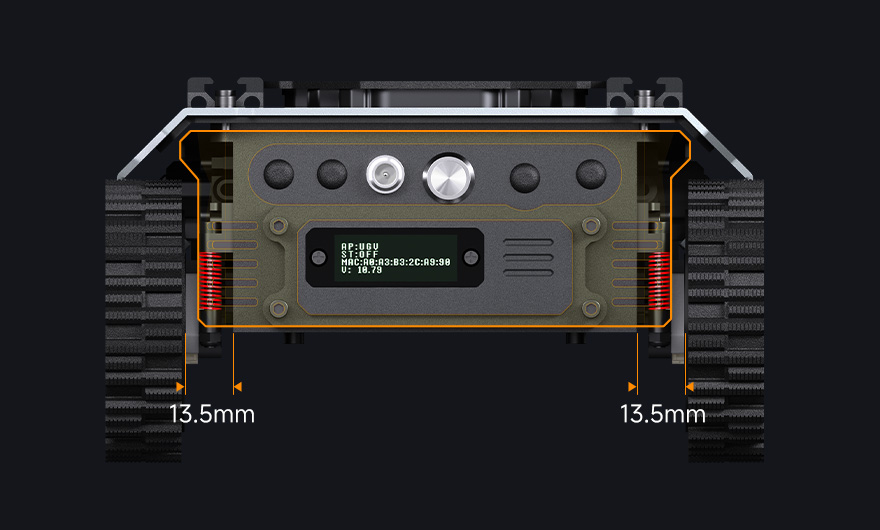
Each hub motor is equipped with an individual CNC metal suspension, featuring simple and reliable structure with better shock absorption performance

Supports installing Raspberry Pi or Jetson Orin series boards as the host computer inside the chassis. The host computer can communicate with the chassis via USB or UART interfaces for motion control and obtaining real-time status feedback from the chassis

Install Jetson Orin series as host computer

Install Raspberry Pi as host computer
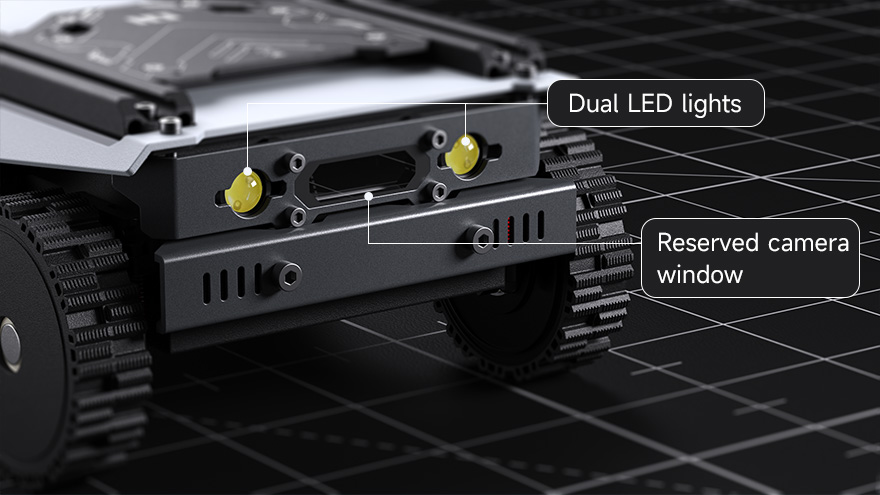
Supports installing various peripherals and modular mounting components for efficient secondary development


The chassis driver board can support RSBL series and ST/SC series bus servos
(* the power supply voltage for servos must be matched)





* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.
Quick Overview
- Cobra Flex x1
- USB Type-A male to Type-A female cable ~1.2m x1
- OPTIONS 12.6V 2A power supply x1
- Packing box x1
- Accessory pack x1





